1631. Path With Minimum Effort
You are a hiker preparing for an upcoming hike. You are given heights, a 2D array of size rows x columns, where heights[row][col] represents the height of cell (row, col). You are situated in the top-left cell, (0, 0), and you hope to travel to the bottom-right cell, (rows-1, columns-1) (i.e., 0-indexed). You can move up, down, left, or right, and you wish to find a route that requires the minimum effort.
A route's effort is the maximum absolute difference in heights between two consecutive cells of the route.
Return the minimum effort required to travel from the top-left cell to the bottom-right cell.
Example 1:
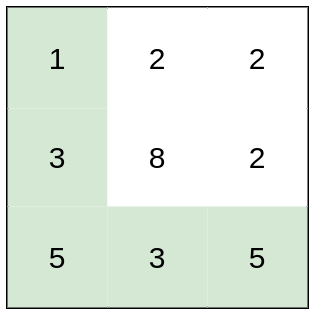
Input: heights = [[1,2,2],[3,8,2],[5,3,5]]
Output:
Explanation: The route of [1,3,5,3,5] has a maximum absolute difference of in consecutive cells.
This is better than the route of [1,2,2,2,5], where the maximum absolute difference is .
Example 2:
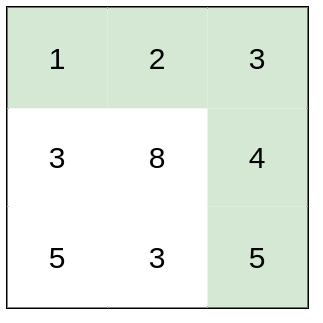
Input: heights = [[1,2,3],[3,8,4],[5,3,5]]
Output:
Explanation: The route of [1,2,3,4,5] has a maximum absolute difference of in consecutive cells, which is better than route [1,3,5,3,5].
Example 3:
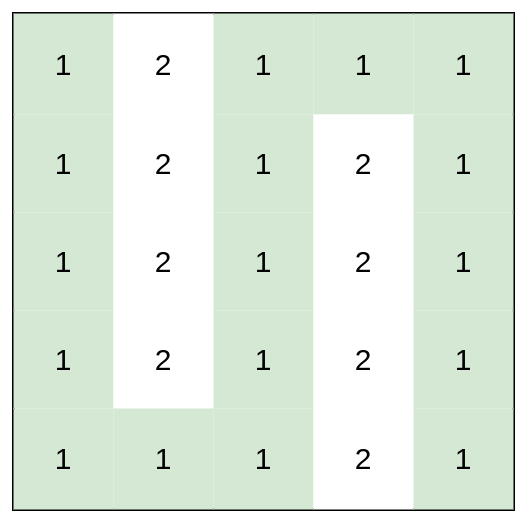
Input: heights = [[1,2,1,1,1],[1,2,1,2,1],[1,2,1,2,1],[1,2,1,2,1],[1,1,1,2,1]]
Output:
Explanation: This route does not require any effort.
Constraints:
rows == heights.length
columns == heights[i].length
heights[i][j]
Solution
Brute Force
Our most simple brute force for this problem would be to try all different routes that start from the top-left cell and end in the bottom-right cell. We'll then find the efforts for all these routes and return the smallest.
Full Solution
Instead of thinking of finding the efforts of all possible routes, we should think about finding routes that have some specific effort. Given some effort , how do we check if there exists a route that has an effort smaller or equal to ?
Let's first denote the distance between two adjacent cells as the absolute difference between their heights.
A route will have an effort smaller or equal to if it travels from the top-left cell to the bottom-right cell and all adjacent cells in the route have a distance that doesn't exceed . To check if such routes exist, we can check if there exists a path from the top-left cell to the bottom-right cell such that we never travel between cells with a distance that exceeds . We can accomplish this with a BFS/flood fill algorithm.
We'll denote an effort as good if there exists a route with an effort smaller or equal to .
The minimum effort that's good is the final answer that we return. To find the minimum effort, we can implement a binary search. Why can we binary search this value? Let's say our minimum good effort is . Our binary search condition is satisfied since all values strictly less than are not good and all values greater or equal to are good.
Every binary search iteration, we can check whether or not some effort is good by running the BFS/flood fill algorithm mentioned above.
Time Complexity
Let's denote as number of rows, as number of colmns, and as maximum height in heights.
Since BFS/flood fill will run in and we have binary search iterations, our final time complexity will be .
Time Complexity:
C++ Solution
class Solution {
const vector<int> deltaRow = {-1, 0, 1, 0};
const vector<int> deltaCol = {0, 1, 0, -1};
bool isValidEffort(vector<vector<int>>& heights, int mid) {
int rows = heights.size();
int columns = heights[0].size(); // dimensions for heights
vector<vector<bool>> vis(rows, vector<bool>(columns)); // keeps track of whether or not we visited a node
queue<int> qRow;
queue<int> qCol;
qRow.push(0);
qCol.push(0); // BFS starts in top-left cell
//We can also use queue<pair<int,int>> to store both the row & col in one queue
vis[0][0] = true;
while (!qRow.empty()) {
int curRow = qRow.front();
qRow.pop();
int curCol = qCol.front();
qCol.pop();
for (int dir = 0; dir < 4; dir++) {
int newRow = curRow + deltaRow[dir];
int newCol = curCol + deltaCol[dir];
if (newRow < 0 || newRow >= rows || newCol < 0 || newCol >= columns) { // check if cell is in boundary
continue;
}
if (vis[newRow][newCol]) { // check if cell has been visited
continue;
}
if (abs(heights[newRow][newCol] - heights[curRow][curCol]) > mid) { // check if distance exceeds limit
continue;
}
vis[newRow][newCol] = true;
qRow.push(newRow);
qCol.push(newCol);
// process next node
}
}
return vis[rows - 1][columns - 1];
}
public:
int minimumEffortPath(vector<vector<int>>& heights) {
int low = -1; // every effort less or equal to low will never be good
int high = (int)1e6; // every effort greater or equal to high will always be good
int mid = (low + high) / 2;
while (low + 1 < high) {
if (isValidEffort(heights, mid)) {
high = mid;
} else {
low = mid;
}
mid = (low + high) / 2;
}
return high;
}
};
Java Solution
class Solution {
final int[] deltaRow = {-1, 0, 1, 0};
final int[] deltaCol = {0, 1, 0, -1};
private boolean isValidEffort(int[][] heights, int mid){
int rows = heights.length;
int columns = heights[0].length; // dimensions for heights
boolean[][] vis = new boolean[rows][columns]; // keeps track of whether or not we visited a node
Queue<Integer> qRow = new LinkedList();
Queue<Integer> qCol = new LinkedList();
qRow.add(0);
qCol.add(0); // BFS starts in top-left cell
vis[0][0] = true;
while (!qRow.isEmpty()) {
int curRow = qRow.poll();
int curCol = qCol.poll();
for (int dir = 0; dir < 4; dir++) {
int newRow = curRow + deltaRow[dir];
int newCol = curCol + deltaCol[dir];
if (newRow < 0 || newRow >= rows || newCol < 0
|| newCol >= columns) { // check if cell is in boundary
continue;
}
if (vis[newRow][newCol]) { // check if cell has been visited
continue;
}
if (Math.abs(heights[newRow][newCol] - heights[curRow][curCol]) > mid){
// check if distance exceeds limit
continue;
}
vis[newRow][newCol] = true;
qRow.add(newRow);
qCol.add(newCol);
// process next node
}
}
return vis[rows-1][columns-1];
}
public int minimumEffortPath(int[][] heights) {
int rows = heights.length;
int columns = heights[0].length; // dimensions for heights
int low = -1; // every effort less or equal to low will never be good
int high = (int) 1e6; // every effort greater or equal to high will always be good
int mid = (low + high) / 2;
while (low + 1 < high) {
if (isValidEffort(heights,mid)) {
high = mid;
} else {
low = mid;
}
mid = (low + high) / 2;
}
return high;
}
}
Python Solution
import collections class Solution: def minimumEffortPath(self, heights: List[List[int]]) -> int: rows = len(heights) columns = len(heights[0]) # dimensions for heights low = -1 # every effort less or equal to low will never be good high = 10 ** 6 # every effort greater or equal to high will always be good mid = (low + high) // 2 def isValidEffort(heights, mid): vis = [[False] * columns for a in range(rows)] # keeps track of whether or not we visited a node qRow = collections.deque([0]) qCol = collections.deque([0]) # BFS starts in top-left cell vis[0][0] = True while qRow: curRow = qRow.popleft() curCol = qCol.popleft() for [deltaRow, deltaCol] in [(-1, 0), (0, 1), (1, 0), (0, -1)]: newRow = curRow + deltaRow newCol = curCol + deltaCol if (newRow < 0 or newRow >= rows or newCol < 0 or newCol >= columns): # check if cell is in boundary continue if vis[newRow][newCol] == True: # check if cell has been visited continue if (abs(heights[newRow][newCol] - heights[curRow][curCol]) > mid): # check if distance exceeds limit continue vis[newRow][newCol] = True qRow.append(newRow) qCol.append(newCol) # process next node return vis[rows-1][columns-1] while low + 1 < high: if isValidEffort(heights,mid): high = mid else: low = mid mid = (low + high) // 2 return high
Ready to land your dream job?
Unlock your dream job with a 2-minute evaluator for a personalized learning plan!
Start EvaluatorWhich technique can we use to find the middle of a linked list?
Recommended Readings
LeetCode Patterns Your Personal Dijkstra's Algorithm to Landing Your Dream Job The goal of AlgoMonster is to help you get a job in the shortest amount of time possible in a data driven way We compiled datasets of tech interview problems and broke them down by patterns This way we
Recursion Recursion is one of the most important concepts in computer science Simply speaking recursion is the process of a function calling itself Using a real life analogy imagine a scenario where you invite your friends to lunch https algomonster s3 us east 2 amazonaws com recursion jpg You first
Runtime Overview When learning about algorithms and data structures you'll frequently encounter the term time complexity This concept is fundamental in computer science and offers insights into how long an algorithm takes to complete given a certain input size What is Time Complexity Time complexity represents the amount of time
Want a Structured Path to Master System Design Too? Don’t Miss This!